Code_Aster
®
Version
3.0
Titrate:
Modeling of damping in linear dynamics
Date:
13/02/96
Author (S):
J.R. LEVESQUE
Key:
R5.05.04-A
Page:
1/16
Manual of Reference
R5.05 booklet: Transitory or harmonic dynamics
HI-75/96/002/A
Organization (S):
EDF/IMA/MN
Manual of Reference
R5.05 booklet: Transitory or harmonic dynamics
Document: R5.05.04
Modeling of damping in dynamics
linear
Summary:
Linear dynamic analyzes of the structures subjected to imposed forces or movements
require to add characteristics of mechanical cushioning to the characteristics of rigidity and of
mass model.
One has several conventional modelings, applicable to all the types of finite elements available:
·
the model of viscous damping,
·
the model of damping hysteretic (known as also “structural damping”)
for the harmonic analysis of viscoelastic materials.
For the analyzes using the methods of dynamic response by modal recombination, with a base
modal of real clean modes, it is possible to introduce modal damping coefficients.
Code_Aster
®
Version
3.0
Titrate:
Modeling of damping in linear dynamics
Date:
13/02/96
Author (S):
J.R. LEVESQUE
Key:
R5.05.04-A
Page:
2/16
Manual of Reference
R5.05 booklet: Transitory or harmonic dynamics
HI-75/96/002/A
Contents
1 Concept of mechanical cushioning ....................................................................................................... 3
1.1 Models of damping ............................................................................................................... 3
1.2 General layouts to characterize damping [bib1] ....................................................... 3
1.2.1 Loss ratio ................................................................................................................ 3
1.2.2 Reduced damping ............................................................................................................. 3
2 Model of viscous damping ......................................................................................................... 4
2.1 Physical definition of viscous damping ............................................................................ 4
2.2 Harmonic oscillator with viscous damping ................................................................... 4
2.2.1 Response to releasing excitation ........................................................................................... 5
2.2.2 Response to a harmonic excitation ................................................................................... 5
3 Model of damping hysteretic ................................................................................................... 6
3.1 Physical definition of damping hysteretic ...................................................................... 6
3.2 Harmonic oscillator with damping hysteretic .............................................................. 8
4 Other models of damping ........................................................................................................... 9
5 Analysis of structure with damping ............................................................................................. 9
5.1 Total damping of the structure .............................................................................................. 9
5.1.1 Viscous damping proportional “total” ..................................................................... 9
5.1.2 Influence damping coefficients proportional ................................................... 10
5.1.3 “Total” damping hysteretic .................................................................................... 11
5.2 Damping localized ................................................................................................................. 12
5.2.1 Elements shock absorbers ......................................................................................................... 12
5.2.2 Affected damping with any type of finite element ................................................................. 12
5.2.3 Construction of the matrix of damping ........................................................................ 13
6 Use of the matrix of damping ............................................................................................ 13
6.1 Use of the matrix of viscous damping ....................................................................... 13
6.1.1 Analyze dynamic linear direct ...................................................................................... 13
6.1.2 Analyze dynamic by modal recombination ................................................................... 13
6.2 Use of the matrix of rigidity complexes ................................................................................ 14
6.3 Complex modal analysis ............................................................................................................. 15
7 Bibliography ........................................................................................................................................ 15
Code_Aster
®
Version
3.0
Titrate:
Modeling of damping in linear dynamics
Date:
13/02/96
Author (S):
J.R. LEVESQUE
Key:
R5.05.04-A
Page:
3/16
Manual of Reference
R5.05 booklet: Transitory or harmonic dynamics
HI-75/96/002/A
1
Concept of mechanical cushioning
1.1 Models
of damping
The movement of the structures subjected to forces or movements imposed, variable with the course
time, depends, in particular of the properties of damping, i.e. of the dissipation of energy
in materials constitutive of the structure and the connections of the various elements of structure
between them and with the surrounding medium.
The physical phenomena intervening in this dissipation of energy are many frictions,
interaction fluid-structure in a fluid blade, shocks, viscosity and plasticity, vibratory radiation
with the supports.
The models of behavior representing these phenomena are often known little about and it is not
possible to explicitly describe them at the elementary level. This is why the most used models
are the simple models which make it possible to reproduce on a macroscopic scale the main effects
on the structures [bib1] [bib2]. Those currently available in Code_Aster are:
·
viscous damping: dissipated energy proportional to the speed of the movement,
·
damping hysteretic (known as also “structural damping”): dissipated energy
proportional to displacement such as the force of damping of sign is opposed to
that speed.
Let us note that the damping of Coulomb, which corresponds to a damping of friction for which
dissipated energy is proportional to the force of normal reaction to the direction of displacement is not
currently not established in Code_Aster.
The values of the parameters of these models are deduced from experimental results. At the stage of
design, one is limited to the use of guiding values.
1.2
General layouts to characterize damping [bib1]
1.2.1 Loss ratio
The loss ratio
is an adimensional coefficient characteristic of definite the shock absorber effect
like the report/ratio of the energy dissipated during a cycle with multiplied maximum potential energy
by
2
:
=
E
E
D
p
by cycle
2
max
éq 1.2-1
1.2.2 Damping
reduced
By definition reduced damping is equal to half of the loss ratio
=
2
éq 1.2-2
Code_Aster
®
Version
3.0
Titrate:
Modeling of damping in linear dynamics
Date:
13/02/96
Author (S):
J.R. LEVESQUE
Key:
R5.05.04-A
Page:
4/16
Manual of Reference
R5.05 booklet: Transitory or harmonic dynamics
HI-75/96/002/A
2
Model of viscous damping
2.1
Physical definition of viscous damping
The conventional cushioning devices (rolling of a viscous fluid through the openings of a piston
driven by the vibratory movement) forces proportional to the speed of the movement deliver
and of opposite sign. During a cycle, the work of these forces is positive: it is damping
viscous.
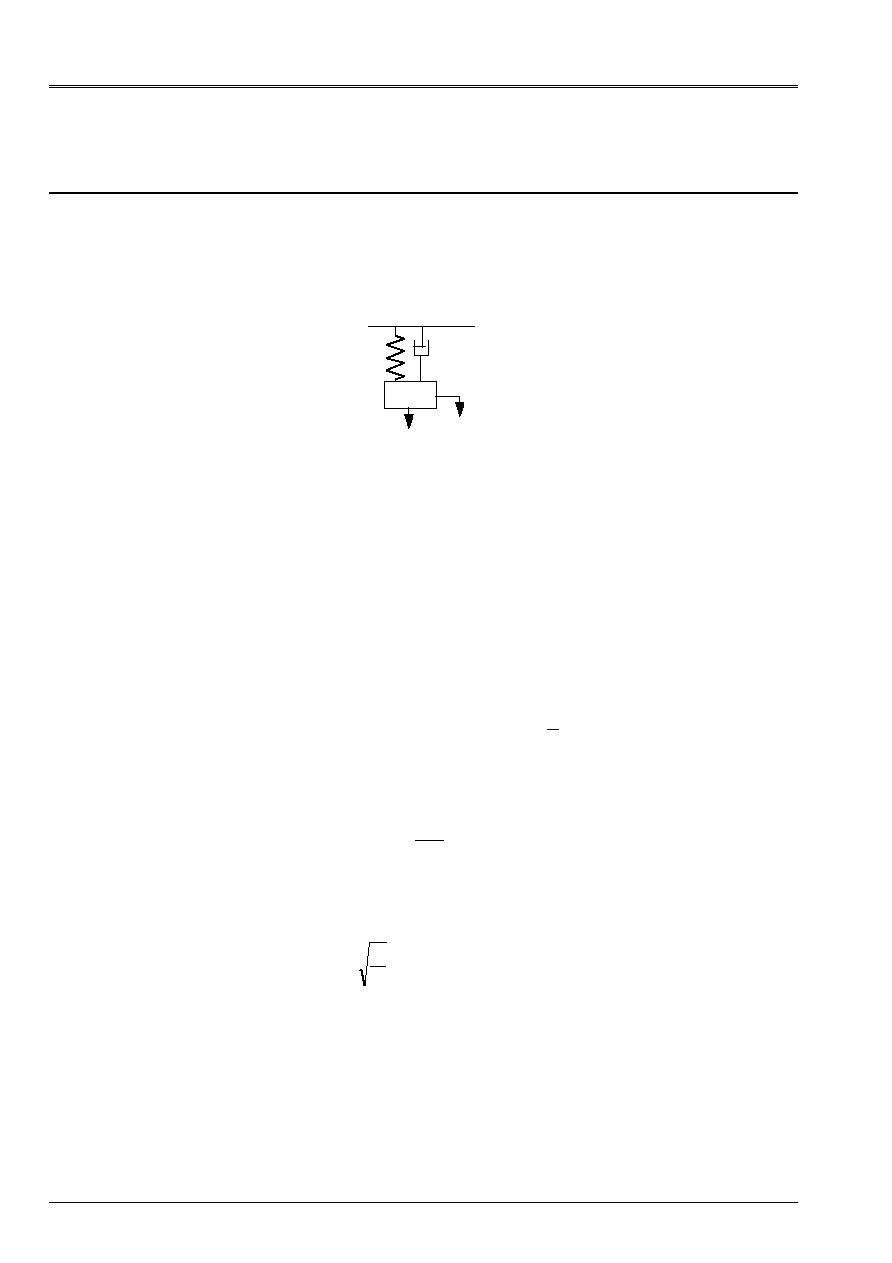
K
C
m
F
U
For a simple oscillator of rigidity
K
, of mass
m
and of viscous damping
C
, the force
external applied balance three components: elastic force of recall
K U
, force
of damping
C U!
and inertia
m U!!
from where the dynamic equation moving absolute:
m u.a. the U.K.U
F
!!
!
+
+
=
éq 2.1-1
For this model of viscous damping the energy dissipated during a cycle of pulsation
is
proportional to the vibratory speed
()
-
U
T
0
sin
associated displacement
()
U
T
0
cos
:
(
)
E
C
U
T
U
T
C
U
D by cycle
=
-
=
0
0
02
sin
D
cos
0
2
and potential energy for a sinusoidal displacement
U
T
0
cos
is:
(
)
E
K U
T
U
T
K U
p max
/
cos
D
cos
=
=
0
0
0
2
0
2
1
2
For a cycle of pulsation
and of sinusoidal displacement
U
T
0
cos
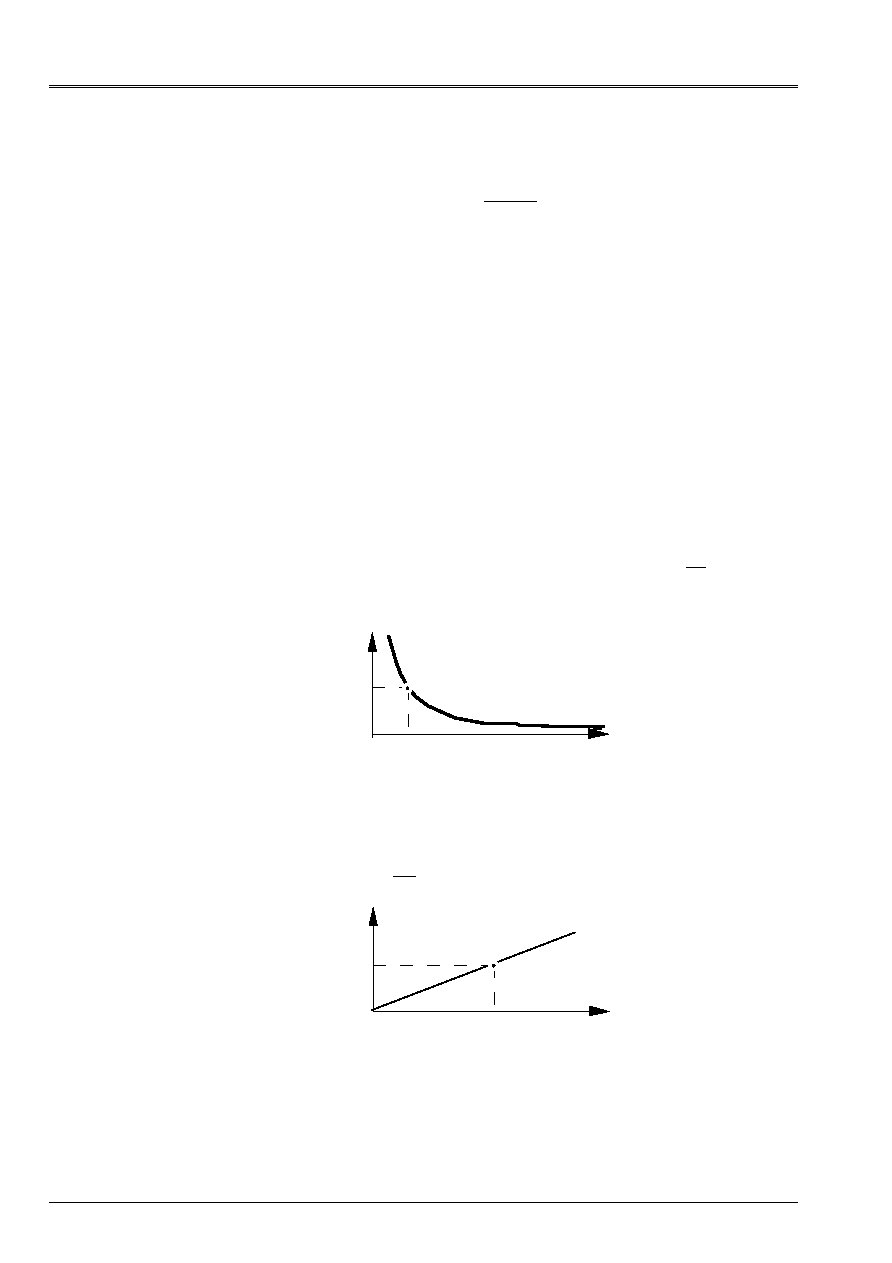
, the loss ratio is
proportional to the frequency of the movement:
=
C
K
éq
2.1-2
2.2
Harmonic oscillator with viscous damping
Conventional analysis of the model not deadened associated the equation [éq. 2.1-1], put in the form
(
)
K m
U
-
=
2
0
us gives
0
K
m
=
the own pulsation.
Code_Aster
®
Version
3.0
Titrate:
Modeling of damping in linear dynamics
Date:
13/02/96
Author (S):
J.R. LEVESQUE
Key:
R5.05.04-A
Page:
5/16
Manual of Reference
R5.05 booklet: Transitory or harmonic dynamics
HI-75/96/002/A
The damping criticizes from which the differential equation [éq 2.1-1] does not have any more an oscillating solution
is given by the formulas
C
km
m
K
critical
0
0
=
=
=
2
2
2
what makes it possible to give one
numerical interpretation of the reduced damping, which is often expressed expressed as a percentage
critical damping:
= =
=
2
2
C
C
C
m
critical
0
éq 2.1-3
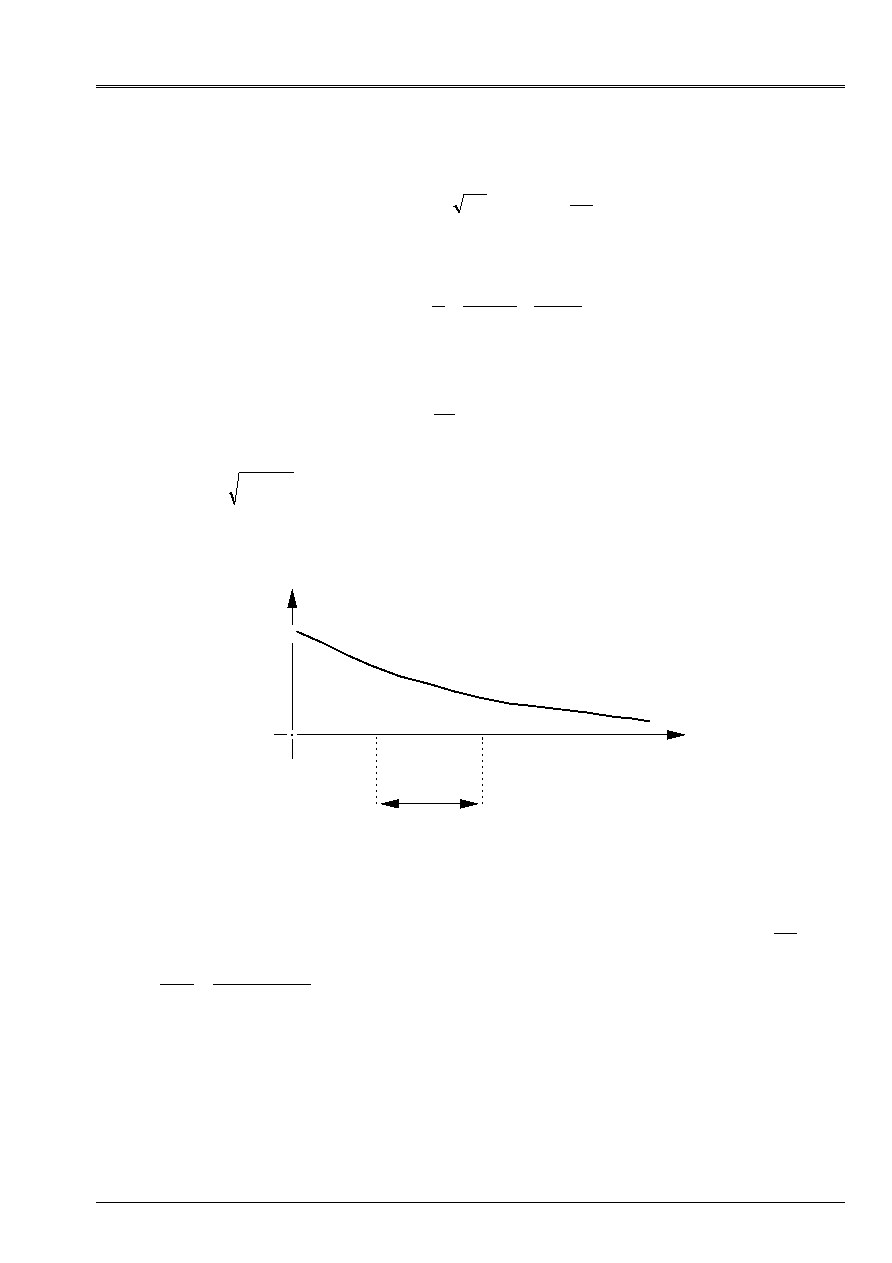
2.2.1 Response to releasing excitation
Starting from a static deformation
U
F
K
St
0
=
, to release (release of the system) produced a movement
oscillatory free
U T
U
T
L
T
0
()
E
cos
=
-
0
0
who reveals the own pulsation of the deadened system
()
'
0
0
=
-
1
2
.
In the course of time, the extreme amplitude
(
)
U U
1
2
,
decrease at each period of
E
E
E
-
-
-
=
=
0
T
2
where
is the decrement logarithmic curve:
=
2
T
U
1
U
2
U
T
U
0
2.2.2 Response to a harmonic excitation
The response to a harmonic excitation of the form
F T
F
0
T
()
E
J
=
is written with a forced answer
permanent particular solution
(
)
U T
U
0
T
()
E
J
=
-
who is written with the reduced pulsation
=
0
()
K U
F
H
0
0
v
= - +
1
1
2
2
J
J
where
()
H
v
J
is the complex transfer function of an oscillator
simple with viscous damping.
Code_Aster
®
Version
3.0
Titrate:
Modeling of damping in linear dynamics
Date:
13/02/96
Author (S):
J.R. LEVESQUE
Key:
R5.05.04-A
Page:
6/16
Manual of Reference
R5.05 booklet: Transitory or harmonic dynamics
HI-75/96/002/A
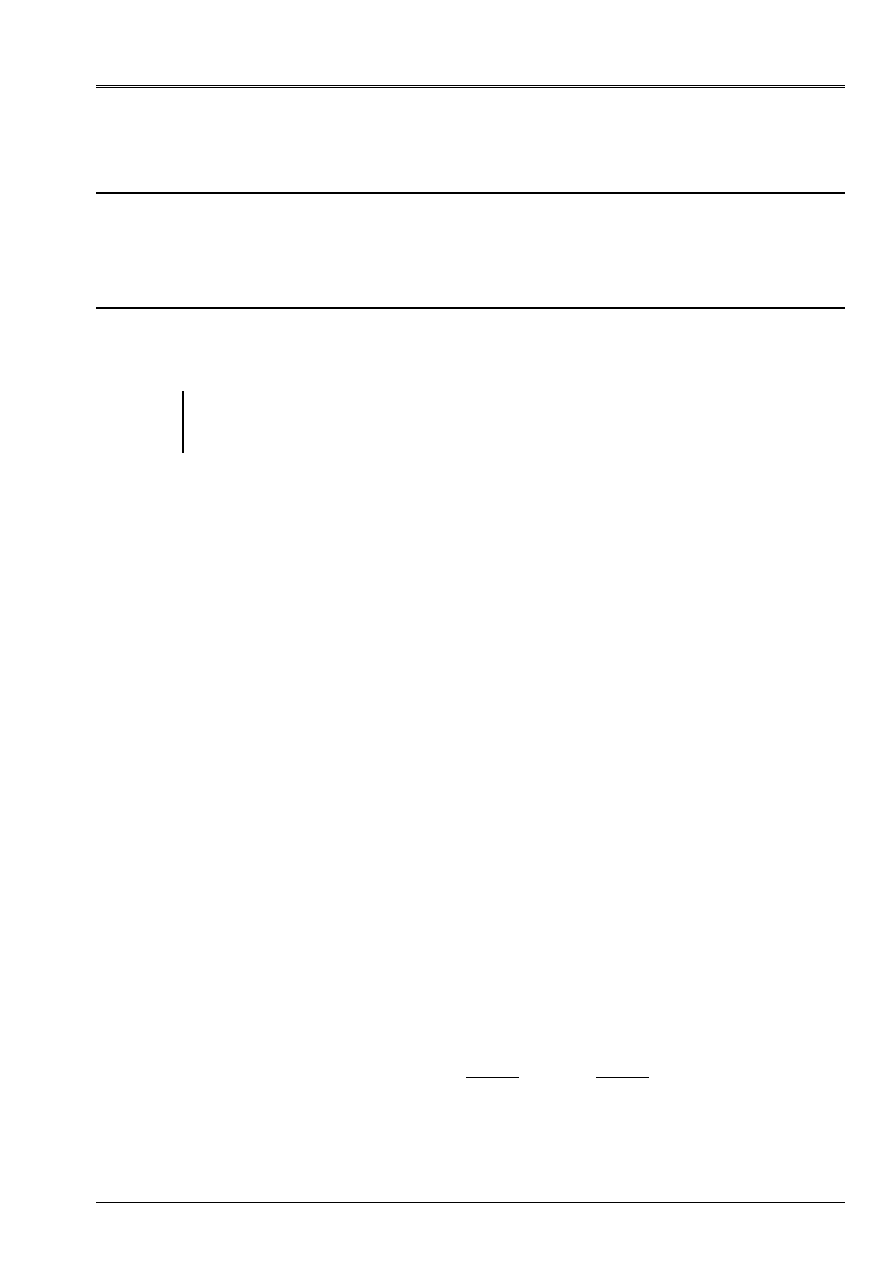
The module of the answer
()
()
()
U
U
K U
F
H
0
St
0
0
v
=
=
=
-
+
J
1
1
2
2 2
2
fact of appearing one
dynamic amplification compared to the static answer
U
St
.
This amplification is maximum for
()
= =
-
0
0
1
2
and the value of displacement gives
maximum
()
U
U
0
St
max
=
-
1
2
1
2
. If vibratory speed is observed
()
!() J
U T
U T
=
, amplification
vibratory speed is maximum for
=
=
0
0
1
and the maximum amplitude speed is
!
max
U
Q
0
=
=
1
2
, where
Q
is the mechanical analogy of the factor of overpressure of the electricians who us
make live. These properties are at the origin of the methods of measurement of the characteristics
of damping of the mechanical structures.
3
Model of damping hysteretic
3.1
Physical definition of damping hysteretic
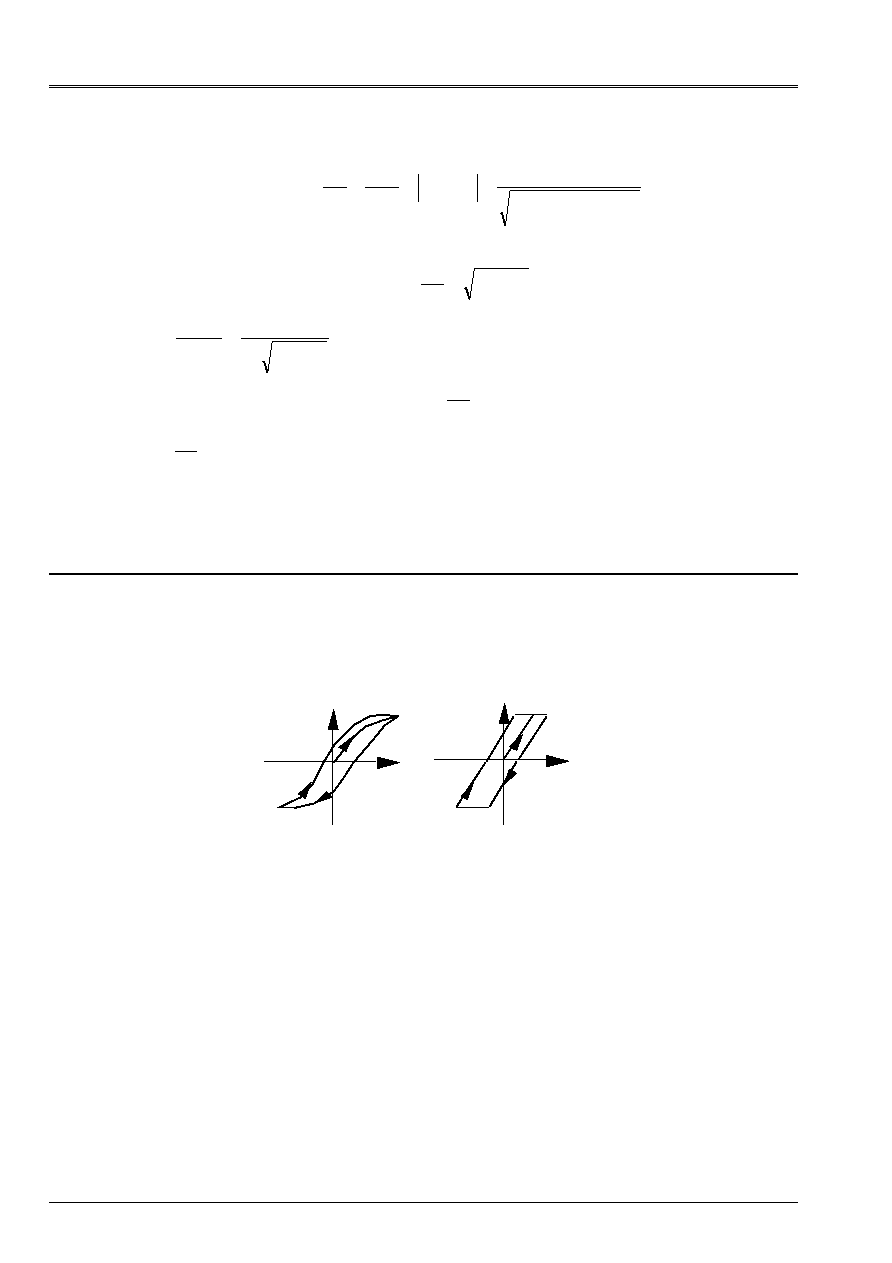
For a sinewave excitation applied to an elastoplastic structure or an elastic structure
with friction, the curve force-displacement reveals a positive work of the external force which
corresponds to an energy dissipated in the structure, which one can at first approximation
to represent like below:
F
U
Elastoplastic
F
U
Slip
In both cases the loss ratio believes, in general with the amplitude of the cycle. For values
weak of the loss ratio (< 0.2), the form of the cycle does not have an appreciable effect on the movement
and one can compare it to an ellipse [bib1].
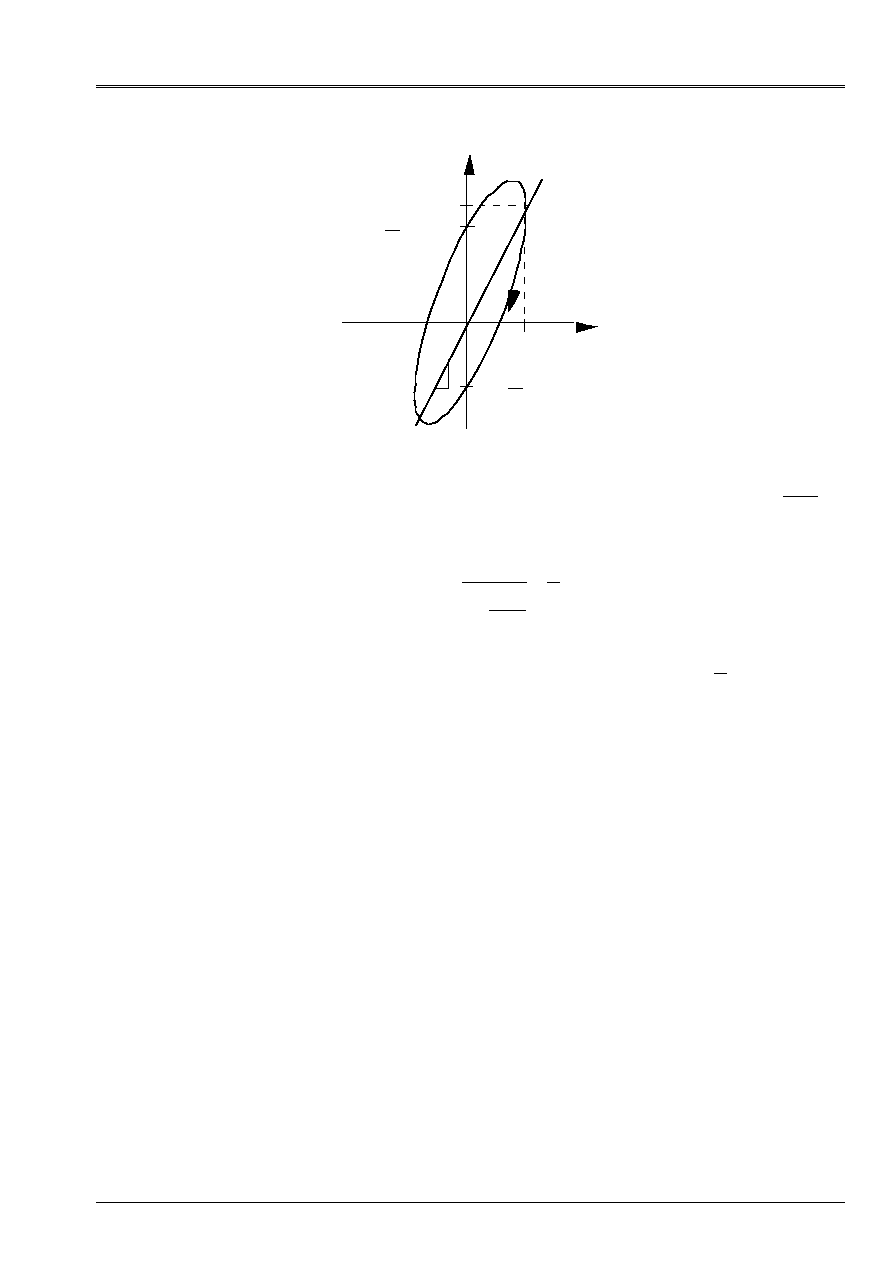
In the particular case of a relation force-displacement whose cycle is of form elliptic,
the expression of the loss ratio is simple. For a force applied
F
and a displacement
U U
=
0
cos
the force of recall is
K U
0
cos
and damping forces it
-
H U
0
sin
what leads
with the relation of balance
F
K U
H U
=
-
0
0
cos
sin
.
Code_Aster
®
Version
3.0
Titrate:
Modeling of damping in linear dynamics
Date:
13/02/96
Author (S):
J.R. LEVESQUE
Key:
R5.05.04-A
Page:
7/16
Manual of Reference
R5.05 booklet: Transitory or harmonic dynamics
HI-75/96/002/A
K U
0
U
0
K
1
= 0
U
F
====
2
- hu
0
= -
= -
= -
= -
2
H U
0
Energies dissipated during a maximum cycle and potential are
(
)
(
)
E
H U
U
H U
E
K U
U
K U
D
p ax
by cycle
m
=
-
=
=
=
0
0
0
2
02
0
0
2
0
02
2
sin D
cos
cos D
cos
/
and
from where the loss ratio
=
=
H U
K U
H
K
02
02
2
2
éq 3.1-1
For a sinusoidal cycle
=
T
, The damping coefficient hysteretic
=
H
K
is independent
of
. It can be given starting from a test under harmonic cyclic loading.
Code_Aster
®
Version
3.0
Titrate:
Modeling of damping in linear dynamics
Date:
13/02/96
Author (S):
J.R. LEVESQUE
Key:
R5.05.04-A
Page:
8/16
Manual of Reference
R5.05 booklet: Transitory or harmonic dynamics
HI-75/96/002/A
3.2
Harmonic oscillator with damping hysteretic
The model of damping hysteretic is usable to treat the harmonic answers of
structures with viscoelastic materials.
The energy dissipated by cycle in the form
E
D by cycle
=
D
0
2
allows to highlight
a complex YOUNG modulus
E
*
starting from the relation stress-strain of a material
viscoelastic
=
0
E
J T
and
(
)
=
-
0
E
J T
where
0
0
and
are the amplitudes and
the phase:
(
)
E
J
*
J
E
cos
sin
=
= =
+
0
0
0
0
While noting
E
1
0
0
=
cos
the real part and
E
2
0
0
=
sin
the imaginary part one obtains
(
)
E
E
E
E
E
E
*
J
J
tg
=
+
=
+
=
=
1
2
1
1
2
1
with
, where
is also called loss angle.
The conventional analysis of the equation [éq 2.1-1] does not have a direction, with a model of damping hysteretic,
that for a harmonic excitation
F T
F
0
J T
()
E
=
who leads to the equation
(
)
(
)
m the U.K.
U m U
K
H U
F
0
T
!!
J
!!
J
E
J
+
+
=
+ +
=
1
éq
3.2-1
where the real part of displacement
U
represent the displacement of the mass and
H K
=
.
As previously cf [§ 2.2], the harmonic answer can be written, with the reduced pulsation
=
0
, in the form
()
K U
F
H
0
0
H
= - +
1
1
2
J
J
where
()
H
H
J
is the transfer function
complex of a simple oscillator with damping hysteretic.
The module of the answer
()
()
U
U
K U
F
H
0
St
0
0
H
=
=
=
-
+
J
1
1
2 2
2
fact of appearing an amplification
dynamics compared to the static answer, amplification which is maximum for
=
1
and gives
value of maximum displacement
U
U
0
St
max
= =
1
1
2
.
In conclusion, damping reduces associated with damping hysteretic is:
= =
=
2
2
2
2
H
K
H
m
0
éq 3.2-2
Code_Aster
®
Version
3.0
Titrate:
Modeling of damping in linear dynamics
Date:
13/02/96
Author (S):
J.R. LEVESQUE
Key:
R5.05.04-A
Page:
9/16
Manual of Reference
R5.05 booklet: Transitory or harmonic dynamics
HI-75/96/002/A
4
Other models of damping
One does not treat models here representing the damping “added” by the motionless fluids
confined or fluids moving. One will refer to the booklet [R4.07] coupling fluid-structure.
5
Analyze structure with damping
Modelings presented are not easily generalizable with the various analyzes of
structures cf [§1].
Note:
Two modelings do not have the same field of linear analysis:
·
viscous damping is usable in transitory or harmonic analysis,
·
damping hysteretic is usable only in harmonic analysis.
The options of modelings in Code_Aster allow the definition:
·
of a total damping for the structure,
·
the depreciation located on meshs or groups of meshs.
5.1
Total damping of the structure
In the absence of sufficient information on the components and connections creating a dissipation of energy,
a current modeling consists in building a matrix of “total” damping.
5.1.1 Viscous damping proportional “total”
One places oneself within the framework of the conventional equations of the dynamics of the linear structures:
()
MR. U.A. THE U.K.U F
!!
!
+
+
=
T
éq
5.1.1-1
The concept of damping of RAYLEIGH makes it possible to define the matrix of damping
C
like
linear combination of the matrices of rigidity and mass:
C
K
M
=
+
éq 5.1.1-2
Advantages:
·
easy to implement by using the operator
COMB_MATR_ASSE
[U4.53.01], after having
assembled the matrices of rigidity and mass with real coefficients.;
·
useful for the validation of algorithms of resolution;
·
historically, its success is attached to the methods of transitory analysis by recombination
modal starting from a base of real clean modes.
Properties of orthogonality of the real clean modes solution of the problem to the values
clean
(
)
K
M
-
=
2
0
result in the simultaneous diagonalisation in the passage
in modal co-ordinates generalized of
T
K
and
T
M
.
The damping of RAYLEIGH is a condition sufficient for diagonaliser
T
C
.
The system of modal equations
!!
!
Q
C
M Q
Q
MR. F ()
+
+
=
T
T
T
T
T
2
becomes diagonal then.
Code_Aster
®
Version
3.0
Titrate:
Modeling of damping in linear dynamics
Date:
13/02/96
Author (S):
J.R. LEVESQUE
Key:
R5.05.04-A
Page:
10/16
Manual of Reference
R5.05 booklet: Transitory or harmonic dynamics
HI-75/96/002/A
!!
!
Q
Q
Q
MR. F ()
+
+
=
2
2
T
T
T
éq 5.1.1-3
Disadvantages:
·
This modeling does not make it possible to represent the heterogeneity of the structure compared to
damping.
·
The damping actually introduced into the model strongly depends on the identification
coefficients
and
Cf [§ 5.1.2].
5.1.2 Influence damping coefficients proportional
Three simple cases of identification are presented here to illustrate, the effects induced by this
modeling:
·
damping proportional to the characteristics of inertia:
=
=
0,
I
This case was very much used of direct transitory resolution: if the matrix of mass is
diagonal, that of damping is still and the space saving memory is obvious.
The coefficient
can be identified with experimental reduced damping
I
mode
clean
(
)
I
I
,
who takes part more in the answer cf [éq. 2.1-1] from where
I
I I
=
2
. For
any other pulsation one obtains a reduced modal damping
=
I
I
. Modes
raised
>>
I
will be deadened very little and the modes low frequency
<
I
too much
deadened.
I
I
2
=
·
damping proportional to the characteristics of rigidity:
=
=
J
,
0
.
The coefficient
can be identified, like previously from
J
associated
mode
()
J
J
,
from where
J
J
J
=
2
. For any other pulsation one obtains one deadened
sow modal tiny room
=
J
J
. High modes
>>
J
are very deadened, etc….
J
J
2
=
Code_Aster
®
Version
3.0
Titrate:
Modeling of damping in linear dynamics
Date:
13/02/96
Author (S):
J.R. LEVESQUE
Key:
R5.05.04-A
Page:
11/16
Manual of Reference
R5.05 booklet: Transitory or harmonic dynamics
HI-75/96/002/A
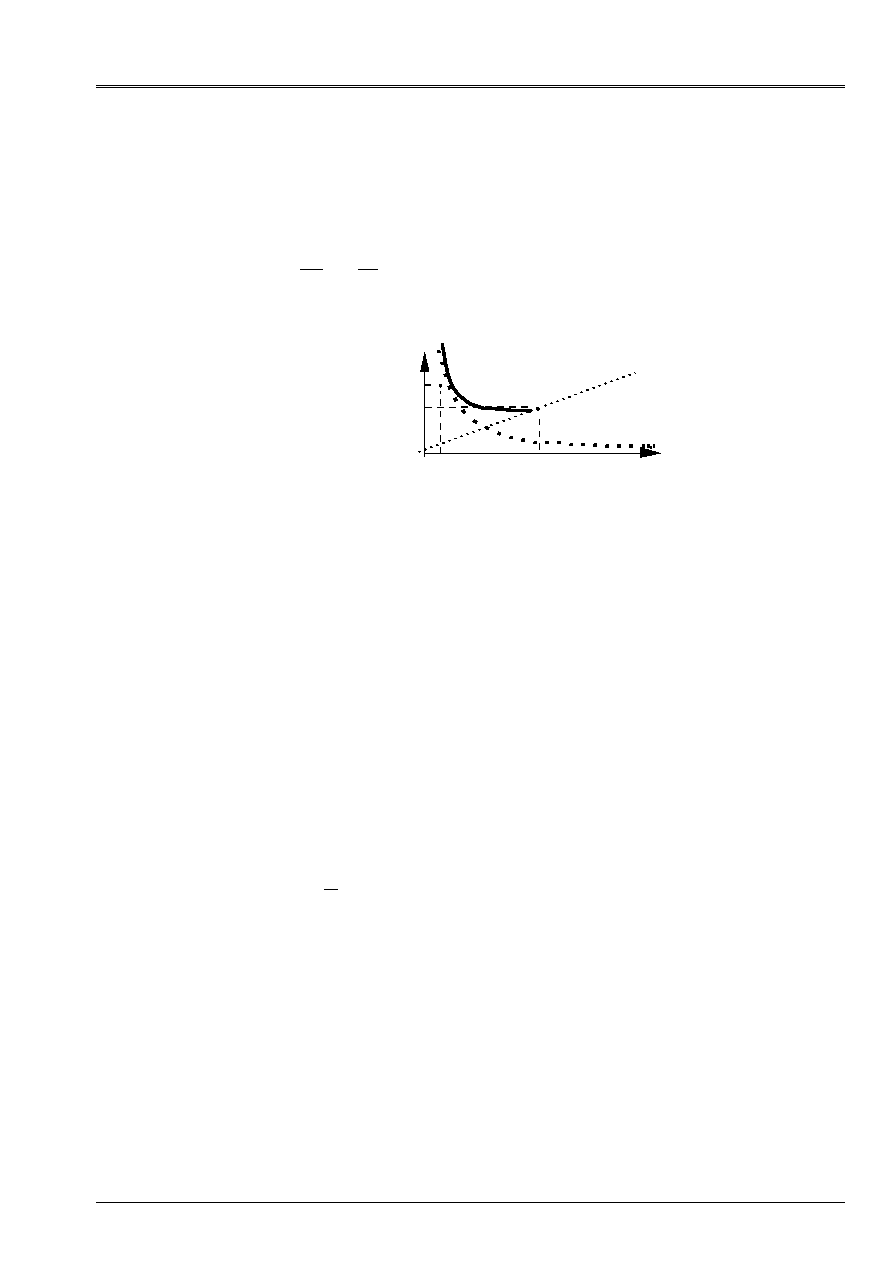
·
damping proportional complete:
=
=
J
I
,
Starting from an identification on two independent modes
(
)
()
I
I
J
J
,
,
and
, us
will obtain for any other pulsation a reduced modal damping
=
+
J
J
I
I
. In the interval
[]
I
J
,
, the variation of reduced damping is
weak and outwards one finds the combination of the preceding disadvantages: modes
outsides with the interval are deadened too much.
J
I
2 =
K+
M
I
J
In none the preceding cases, one will be able to reproduce an assumption of equal modal damping
for all the modes. Methods were imagined for tending towards this objective [bib1].
5.1.3 “Total” damping hysteretic
The generalization of the equation of the simple oscillator with damping hysteretic leads to
system of complex equations or
()
F
is a harmonic excitation.
(
)
()
MR. THE U.K.
U F
!!
+
=
1
+
J
éq 5.1.3-1
Knowing the matrix of real rigidity, it is possible to build a matrix of damping
hysteretic
K
K
H
=
J
, with a “total” loss ratio
.
As previously of resolution by modal recombination, starting from a base of clean modes
realities, one obtains
T
T
H
T
T
J
F T
M Q
K
Q
K Q
!!
()
+
=
+
where the matrix of damping
hysteretic generalized is diagonal
[
]
T
H
I
K
=
diag
, as the matrix of rigidity
generalized
[
]
T
I
K
=
diag
.
According to the definition of reduced damping (cf [éq 1.2-2]), modal damping is constant for
all modes from where
=
2
Advantages:
·
easy to implement by using the operator
COMB_MATR_ASSE
[U4.53.01], after having
assembled the matrices of rigidity.;
·
very useful for the validation of algorithms of resolution;
·
the damping actually introduced into the model is constant for all the modes of
structure, as asks it payments of construction.
Disadvantages:
·
this modeling is badly adapted for the industrial studies, because it does not allow
to represent the heterogeneity of the structure compared to damping.
·
only the harmonic analysis (in complex) is possible.

Code_Aster
®
Version
3.0
Titrate:
Modeling of damping in linear dynamics
Date:
13/02/96
Author (S):
J.R. LEVESQUE
Key:
R5.05.04-A
Page:
12/16
Manual of Reference
R5.05 booklet: Transitory or harmonic dynamics
HI-75/96/002/A
5.2 Damping
located
For the analyzes requiring a modeling representing the heterogeneity of the structure, it is
possible to affect characteristics of damping located on the meshs of the structure, in
fact on elements of the model.
5.2.1 Elements
shock absorbers
It is possible to apply elements discrete shock absorbers:
·
on meshs
POI1
: damping is related to the displacement (respectively speed) of
node support,
·
on
meshs
SEG2
: damping is related to relative displacement (respectively
relative speed) of the two nodes connected.
The operator
AFFE_CARA_ELEM
[U4.24.01] allows to define for each discrete element:
·
a matrix of damping of the viscous type
has
discrete
whose terms are affected to
various degrees of freedom from the nodes concerned; several modes of description of
matrix are available.
·
a hysteretic loss ratio
discrete
multiplier of the matrix of rigidity of the element
discrete affected with the mesh support.
5.2.2 Affected damping with any type of finite element
The affected elastic material with any finite element can be defined with parameters of damping
by the operator
DEFI_MATERIAU
[U4.23.01]:
·
Viscous damping proportional with two parameters of RAYLEIGHT
and
.
AMOR_ALPHA
:
AMOR_BETA
:
For all the types of finite elements (of continuous, structural or discrete mediums), it is
possible to calculate the real elementary matrices corresponding to the option of calculation
“AMOR_MECA”
, after having calculated the elementary matrices corresponding to the options of
calculation
“RIGI_MECA”
and
“MASS_MECA”
.
The elementary matrix of the element
I
affected of material
J
J
,
is then of the form:
-
for a finite element
C
K
m
elem I
J
elem I
J
elem I
=
+
-
for a discrete element
C
has
elem I
discrete I
=
·
Damping hysteretic with a coefficient of
E
AMOR_HYST: coeff
For all the types of finite elements (of continuous, structural or discrete mediums), it is
possible to calculate the complex elementary matrices corresponding to the option of calculation
“RIGI_MECA_HYST”
, after having calculated the elementary matrices corresponding to
options of calculation
“RIGI_MECA”
.
Code_Aster
®
Version
3.0
Titrate:
Modeling of damping in linear dynamics
Date:
13/02/96
Author (S):
J.R. LEVESQUE
Key:
R5.05.04-A
Page:
13/16
Manual of Reference
R5.05 booklet: Transitory or harmonic dynamics
HI-75/96/002/A
The elementary matrix of the element
I
affected of material
J
J
,
is then of the form:
-
for a finite element
(
)
K
K
elem I
elem I
J
*
J
=
+
1
-
for a discrete element
(
)
K
K
elem I
elem I
discrete I
*
J
=
+
1
Important remark:
A fault of November 1995 showed that this option is not
usable in version 3.6.
It will be corrected in version 3.7.
5.2.3 Construction of the matrix of damping
The assembly of the elementary matrices of damping is obtained with the operator
ASSE_MATRICE
usual [U4.42.02] or by the macro control
MACRO_MATR_ASSE
[U4.31.02]. One must use them
same classifications and same mode of storage as for the matrices of rigidity and mass
(operator
NUME_DDL
[U4.42.01]).
Note:
The matrix of damping obtained is nonproportional
C
K
M
K
K
+
or
H
J
6
Use of the matrix of damping
6.1
Use of the matrix of viscous damping
6.1.1 Analyze dynamic linear direct
The matrix of viscous damping
C
, whatever its mode of development and its character
proportional or not proportional,
is usable for the direct linear analysis dynamic (key word
MATR_AMOR
) with the operators:
·
of analysis
transient
DYNA_LINE_TRAN
[R5.05.02] and
[U4.54.01]
·
of analysis
harmonic
DYNA_LINE_HARM
[R5.05.03] and
[U4.54.02]
6.1.2 Analyze dynamic by modal recombination
For the analyzes by modal recombination, one must project this matrix in the definite subspace
by a unit
real clean modes, obtained on the associated problem not deadened
(
)
K
M
-
=
2
0
.
This operation is possible with the macro control
MACRO_PROJ_BASE
[U4.55.11] or with
the operator
PROJ_MATR_BASE
[U4.55.01].

Code_Aster
®
Version
3.0
Titrate:
Modeling of damping in linear dynamics
Date:
13/02/96
Author (S):
J.R. LEVESQUE
Key:
R5.05.04-A
Page:
14/16
Manual of Reference
R5.05 booklet: Transitory or harmonic dynamics
HI-75/96/002/A
For the calculation of the dynamic response in force or imposed in modal space, one
have following possibilities:
·
use of the matrix of damping generalized
T
C
:
-
in transitory analysis with the operator
DYNA_TRAN_MODAL
[R5.06.04] and [U4.54.03] and it
key word
AMOR_GENE,
- in seismic analysis by spectral method with the operator
COMB_SISM_MODAL
[R4.05.03] and [U4.54.04] and the key word
AMOR_GENE,
-
in harmonic analysis with the operator
DYNA_LINE_HARM
[R5.05.03] and [U4.54.02] and it
key word
MATR_AMOR.
Let us recall that in the case of heterogeneous damping (use of the options
of damping localized), the matrix
T
C
is not by diagonal.
·
use of viscous modal damping by providing a reduced modal damping
constant for all the modes
or a list of values
I
.
Several methods of identification of these coefficients are possible but there does not exist
order automatic construction of the list of values: use of the assumption of
BASILE
2
I
I
=
diag
T
T
C
M
, method of payment RCC-G for the seismic analysis
with damping of the ground, exploitation of experimental results,…
-
in transitory analysis with the operator
DYNA_TRAN_MODAL
[R5.06.04] [U4.54.03] and it
key word
AMOR_REDUIT.
- in seismic analysis by spectral method with the operator
COMB_SISM_MODAL
[R4.05.03] [U4.54.04] and key words
AMOR
or
LIST_AMOR
. An evolution is required
to generalize the key word
AMOR_REDUIT
.
-
in harmonic analysis a request for evolution with the operator
DYNA_LINE_HARM
[R5.05.03] [U4.54.02] is deposited. It is not treated in version 3.6.
For the analyzes by dynamic under-structuring, with the use of a modal base (bases
RITZ) one will refer to [R4.06.03] and [R4.06.04].
6.2
Use of the complex matrix of rigidity
The complex matrix of rigidity
K
K K
*
= +
H
, where
K
H
is an imaginary matrix (within the meaning of
complexes!), is usable for the direct harmonic analysis with the operator
DYNA_LINE_HARM
[R5.05.03] and [U4.54.02] and the key word
MATR_RIGI
.
For the analyzes by modal recombination, no functionality is currently available for
the hysteretic use of the model of damping.
Code_Aster
®
Version
3.0
Titrate:
Modeling of damping in linear dynamics
Date:
13/02/96
Author (S):
J.R. LEVESQUE
Key:
R5.05.04-A
Page:
15/16
Manual of Reference
R5.05 booklet: Transitory or harmonic dynamics
HI-75/96/002/A
6.3
Complex modal analysis
The matrix of viscous damping
C
is essential for the modal analysis complexes with
operators dealing with the quadratic problem with the eigenvalues
[R5.01.02]:
·
by iterations opposite
MODE_ITER_INV
[U4.52.01]
·
by simultaneous iterations
MODE_ITER_SIMULT
[U4.52.02]
For the search for eigenvalues, no functionality is currently available for
the use of the model of hysterical damping.
Let us recall that the complex clean modes allow an approach adapted better to the study
dynamics of the strongly deadened structures (reduced damping
> 20%). To date no tool
of dynamic response by modal recombination using a base of complex clean modes
is not available in Code_Aster.
7 Bibliography
[1]
“Damping”: Francoise GANTENBEIN and Michel LIVOLANT (CEA-DMT) in “Engineering
Paraseismic " collective Work - Presses of the E.N.P.C. (1985)
[2]
“Damping in the structural analyzes”: Forum IPSI -
2
HAVE Volume XVIII N°2 (June
1994)
Code_Aster
®
Version
3.0
Titrate:
Modeling of damping in linear dynamics
Date:
13/02/96
Author (S):
J.R. LEVESQUE
Key:
R5.05.04-A
Page:
16/16
Manual of Reference
R5.05 booklet: Transitory or harmonic dynamics
HI-75/96/002/A
Intentionally white left page