Code_Aster
®
Version
5.0
Titrate:
Transitory SDLD04 Response of a system mass-springs
Date:
30/08/01
Author (S):
Fe WAECKEL, L. VIVAN
Key
:
V2.01.004-C
Page:
1/8
Manual of Validation
V2.01 booklet: Linear dynamics of the discrete systems
HT-62/01/012/A
Organization (S):
EDF/RNE/AMV, CS IF
Manual of Validation
V2.01 booklet: Linear dynamics of the discrete systems
Document: V2.01.004
SDLD04 - Transitory response of a system
mass-springs subjected to an acceleration
imposed
Summary
This test consists in calculating the not deadened transitory response of a linear system mass-springs embedded
free subjected to an imposed acceleration.
One tests the discrete element in traction and compression, the calculation of the clean modes, the static modes and it
calculation of the transitory response of a system subjected to an imposed acceleration. Direct calculation is compared
response to its calculation by modal recombination.
This case test is from guide VPCS. The reference solution is an analytical calculation. Errors on
results obtained are normal taking into account the pitch of time chosen for numerical integration.
Code_Aster
®
Version
5.0
Titrate:
Transitory SDLD04 Response of a system mass-springs
Date:
30/08/01
Author (S):
Fe WAECKEL, L. VIVAN
Key
:
V2.01.004-C
Page:
2/8
Manual of Validation
V2.01 booklet: Linear dynamics of the discrete systems
HT-62/01/012/A
1
Problem of reference
1.1 Geometry
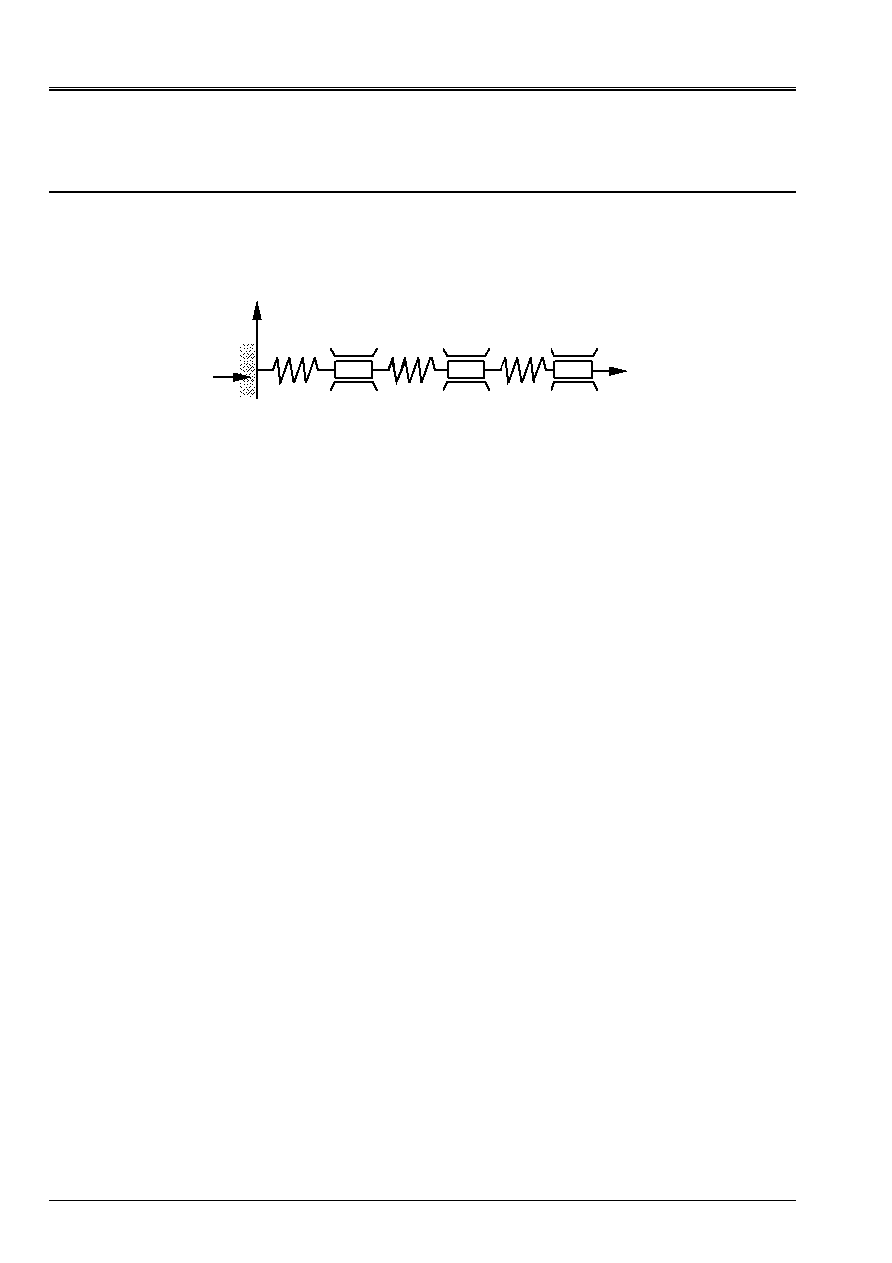
One calculates the response of a linear system composed of three masses and three springs to one
acceleration imposed on the level of its point of anchoring (A):
K
2
X
y
(
T
)
m1
m
3
With
B
C
D
m
2
m
1
K
3
K
1
1.2
Properties of materials
·
stiffnesses of connection: K = K
1
= K
2
= K
3
= 1000 NR/m;
·
specific masses: m = m
1
= m
2
= m
3
= 1 kg.
1.3
Boundary conditions and loadings
Boundary conditions
Only authorized displacements are the translations according to axis X.
Point A is embedded: dx = Dy = dz = drx = dry = drz = 0.
Loading
The point of anchoring A is subjected to an acceleration, function increasing of time, according to
direction X:
(T) = 2.10
5
.t
2
(T vary from 0 to 0,1 S).
1.4 Conditions
initial
The system is initially at rest: with T = 0, dx (0) =0 and dx/dt (0) = 0 in any point.
Code_Aster
®
Version
5.0
Titrate:
Transitory SDLD04 Response of a system mass-springs
Date:
30/08/01
Author (S):
Fe WAECKEL, L. VIVAN
Key
:
V2.01.004-C
Page:
3/8
Manual of Validation
V2.01 booklet: Linear dynamics of the discrete systems
HT-62/01/012/A
2
Reference solution
2.1
Method of calculation used for the reference solution
One calculates the Eigen frequencies initially F
I
and clean vectors
Ni
associated
standardized compared to the matrix of mass. One calculates then the generalized response of the system
mono-excited by solving analytically the integral of Duhamel [bib1]. Lastly, one restores on the basis
physique displacement relating to point D.
Calculation of the Eigen frequencies
The matrices of mass and stiffness are as follows:
M
K
=
=
-
-
-
-
m
m
m
K
0
0
0
0
0
0
2
1
0
1
2
1
0
1
1
,
Eigen frequencies
are solution of the equation
[
]
det K
M
-
=
2
0
, that is to say
3
2
5
6
1 0
-
+
- =
where
=
0
and
= km
.
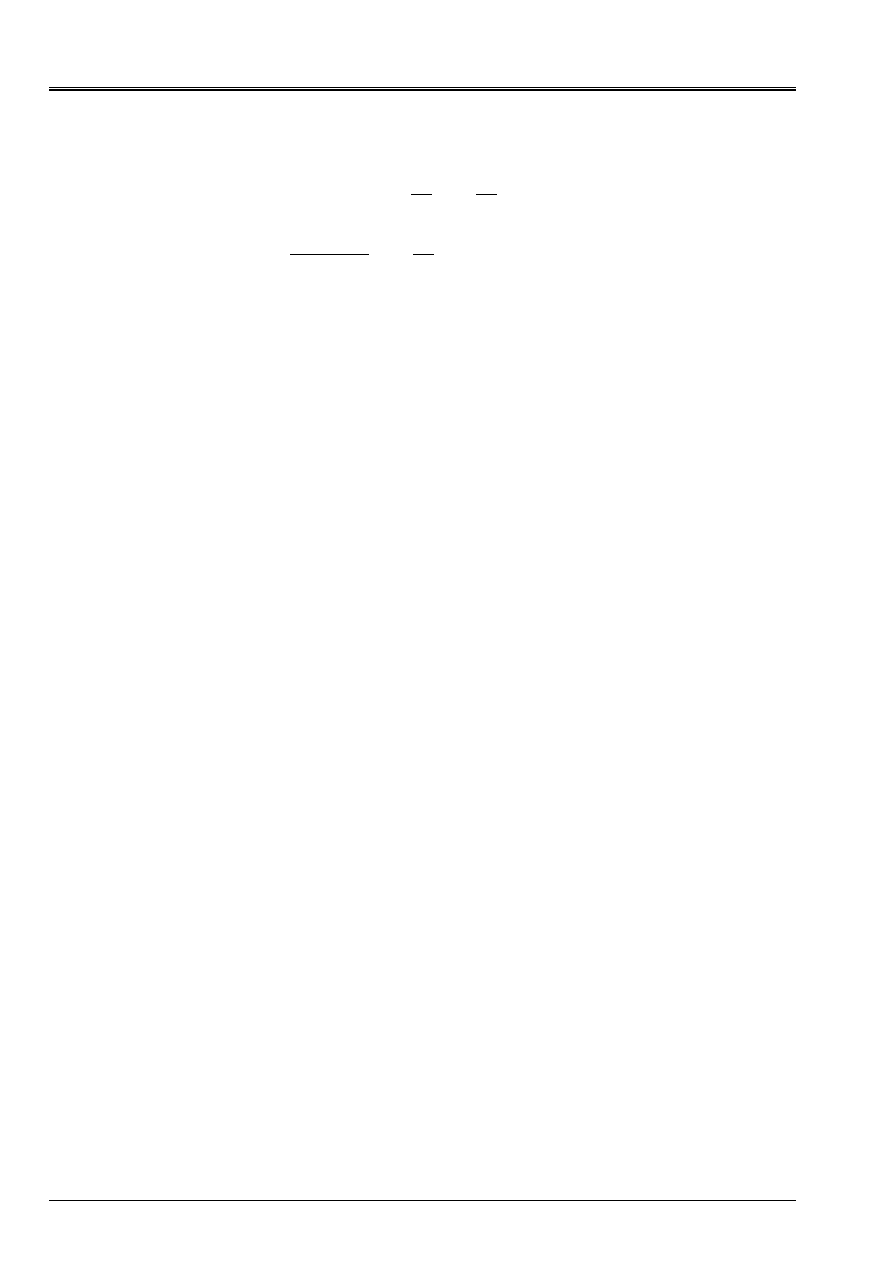
Calculation of the generalized response of the mono-excited system
(T) = A.T
2
with A = 2.10
5
.
In the absolute reference mark, the fundamental equation of the dynamics of the system mass-springs not
deadened is written:
MR. X
K X
has
has
& & +
= 0
.
Absolute displacement
X
has
breaks up into a uniform displacement of drive in translation
X
E
and in a relative displacement
X
R
:
X
X
X
has
=
+
R
E
.
The equation of the movement in the relative reference mark is written then:
MR. X
K X
M
X
Q
&&
&&
R
R
S
+
= -
=
with
()
&&
.
X
S
=
=
T
T has
2
and
=
1
1
1
and thus
Q
=
T m has
.
2
1
1
1
.
The equation of the movement projected on the basis of dynamic mode standardized compared to
stamp of mass is written:
()
()
()
() ()
&&
.
.
I
I
I
iT
I
T
I
I
T
T
T
p T
T
+
=
= -
2
M
M
.
The response of this linear system, at one moment
T
is given by the integral of Duhamel:
()
() ()
(
)
()
(
)
&&
.sin
.
sin
I
I
I
I
T
I
I
I
T
T
p T
T
T
D
p T
T has
T
D
=
-
-
= -
-
1
0
2
0
.
Code_Aster
®
Version
5.0
Titrate:
Transitory SDLD04 Response of a system mass-springs
Date:
30/08/01
Author (S):
Fe WAECKEL, L. VIVAN
Key
:
V2.01.004-C
Page:
4/8
Manual of Validation
V2.01 booklet: Linear dynamics of the discrete systems
HT-62/01/012/A
However, according to [bib1],
(
)
(
)
T has
T
D
T
T
I
T
I
I
I
.
sin
cos
2
0
2
2
1
-
=
+
-
.
Thus
()
(
)
X
p T has
T
T
R
I
I
I
I
I
I
I
I
=
= -
+
-
.
.
.
cos
2
2
2
1
.
2.2
Results of reference
One takes for results of reference the three Eigen frequencies of the system and relative displacement
X
R
at the point D, for various moments ranging between 0 and 0,1 S.
2.3
Uncertainty on the solution
No if one calculates the integral of Duhamel analytically [bib1], [bib2].
2.4 References
bibliographical
[1]
J.S. PRZEMIENIECKI: Theory off matrix structural analysis. New York, Mac Graw-Hill, 1968,
p. 351-357
[2]
S.P. TIMOSHENKO, D.H. YOUNG and W. WEAVER: Vibrations problems in engineering
4th edition, New York, Wiley & Sounds, 1974, p. 284-321
Code_Aster
®
Version
5.0
Titrate:
Transitory SDLD04 Response of a system mass-springs
Date:
30/08/01
Author (S):
Fe WAECKEL, L. VIVAN
Key
:
V2.01.004-C
Page:
5/8
Manual of Validation
V2.01 booklet: Linear dynamics of the discrete systems
HT-62/01/012/A
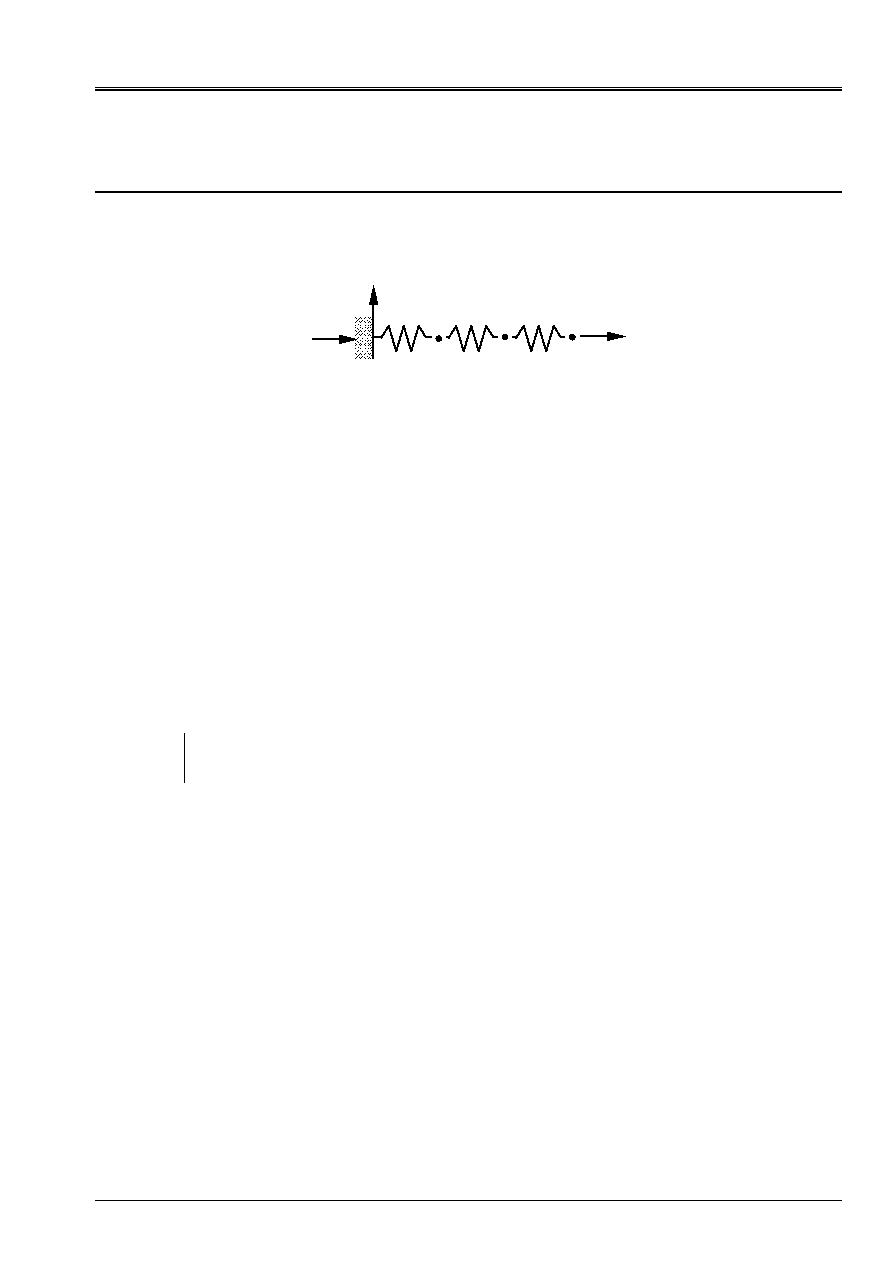
3 Modeling
With
3.1
Characteristics of modeling
The springs and specific masses are modelized by discrete elements with 3 degrees of freedom
“DIS_T”:
X
NO1
NO2
NO3
NO4
Y
K
3
K
2
K
1
Node NO1 is embedded and subjected to an imposed acceleration
(T). Displacement is calculated
relative of node NO4.
Calculations by modal synthesis
One considers the complete base of the clean modes. Temporal integration is carried out with
algorithms of Newmark, Euler and Devogelaere with a pitch of times of 0,001 S. calculations
all the pitches of time are filed.
A reduced damping is considered
I
no one for the whole of the calculated modes.
The loading is taken into account in the form of vector projected on the modal basis
EXCIT:(VECT_GENE)
or in the form of modal component
EXCIT:(NUME_MODE)
or both with
the time.
Direct calculations
Temporal integration is carried out either with the algorithm of Newmark or with the explicit algorithm
differences centered with a pitch in times of 0,001 S. calculations are filed all the ten pitches
time.
Note:
As the diagram of the centered differences can be used only with one matrix of mass
diagonal, one calculates the elementary matrices with the option
MASS_MECA_DIAG
in the operator
CALC_MATR_ELEM
.
Taking into account of an initial state
In the two types of calculation, one checks that the relative displacement obtained of a calculation carried out in one
time is identical to that obtained in several times, i.e. while regarding as initial state, it
result of the last pitch of calculated time:
ETAT_INIT: (RESU_GENE: …)
for a calculation by modal synthesis;
ETAT_INIT: (DYNA_TRAN)
or
ETAT_INIT: (DEPL_INIT: …
VITE_INIT: .)
for a direct calculation.
Taking into account of the modes neglected by static correction:
One considers a modal base made up of the first two clean modes and one has supplements it by
a mode corresponding to the static response of the system studied to a unit loading of type
force imposed in the direction X (key words
MODE_CORR
and
CORR_STAT
in L `operator
DYNA_TRAN_MODAL
).
3.2
Characteristics of the mesh
A number of nodes: 4
A number of meshs and types: 3
DIS_T
Code_Aster
®
Version
5.0
Titrate:
Transitory SDLD04 Response of a system mass-springs
Date:
30/08/01
Author (S):
Fe WAECKEL, L. VIVAN
Key
:
V2.01.004-C
Page:
6/8
Manual of Validation
V2.01 booklet: Linear dynamics of the discrete systems
HT-62/01/012/A
3.3 Functionalities
tested
Controls
Keys Doc. V5
AFFE_MODELE GROUP_MA
“MECHANICAL”
“DIS_T'
[U4.41.01]
DISCRETE AFFE_CARA_ELEM
NODE
M_T_D_N
[U4.42.01]
GROUP_MA
K_T_D_L
CALC_MATR_ELEM OPTION
MASS_MECA_DIAG
[U4.61.01]
MODE_ITER_SIMULT PLUS_PETITE
MAX_FREQ
[U4.52.03]
CALC_CHAR_SEISME MONO_APPUI
[U4.63.01]
MACRO_PROJ_BASE
[U4.63.11]
AFFE_CHAR_MECA FORCE_NODALE
[U4.44.01]
MACRO_ELAS_MULT CHAR_MECA_GLOBAL
[U4.51.02]
CAS_CHARGE
CHAR_MECA
DYNA_TRAN_MODAL METHOD
NEWMARK
[U4.53.21]
DEVOGE
EULER
ETAT_INIT
RESU_GENE
MODE_CORR
EXCIT
CORR_STAT
DYNA_LINE_TRAN METHOD
NEWMARK
[U4.53.02]
DIFF_CENTER
ETAT_INIT
DEPL_INIT
VITE_INIT
DYNA_TRANS
Code_Aster
®
Version
5.0
Titrate:
Transitory SDLD04 Response of a system mass-springs
Date:
30/08/01
Author (S):
Fe WAECKEL, L. VIVAN
Key
:
V2.01.004-C
Page:
7/8
Manual of Validation
V2.01 booklet: Linear dynamics of the discrete systems
HT-62/01/012/A
4
Results of modeling A
4.1
Values tested of modeling A
Eigen frequencies (in Hz) of the system:
Number of the mode
Analytical
Code_Aster
relative error %
1 2,239
2,240
0,038
2 6,275
6,276
0,015
3 9,069
9,069
0
Values of the relative displacement of node NO4 for various moments:
Transitory calculation by modal synthesis
One tests the taking into account of a loading in the form of vector projected on the modal basis, under
form of modal component, in the form of projected vector and of modal component
at the same time as well as the taking into account of the neglected modes.
Time (S)
Reference
Code_Aster
Loading of the type
generalized vector
Algorithm of
Newmark
Error
relative %
Code_Aster
Loading of the type
modal component
Algorithm of Euler
Error
relative
%
0,02 2,700E03 2,680E03
0,741 2,660E03
1,481
0,04 4,260E02 4,272E02
0,279 4,264E02 0,091
0,05 1,041E01 1,042E01
0,134 1,041E01 0,015
0,06 2,158E01 2,161E01
0,121 2,159E01 0,038
0,08 6,813E01 6,819E01
0,094 6,816E01 0,049
0,10 1,658E+00 1,659E+00 0,082
1,659E+00
0,055
Type of loading
Time (S)
Reference
Code_Aster
relative error %
0,02
5,400E03
5,320E03
1,482
Generalized vector
0,04
8,520E02
8,528E02
0,091
and 0,05
2,082E01
2,082E01
0,015
modal component
0,06 4,316E01
4,318E01
0,038
simultanéement 0,08
1,363E+00 1,363E+00
0,049
(Euler) 0,10
3,316E+00 3,318E+00
0,055
0,02
4,000E03
3,985E03
0,373
Generalized vector
0,04
4,640E02
4,640E02
0,01
Devogelaere 0,05
1,085E01 1,086E01
0,084
(more correction
0,06 2,203E01
2,204E01
0,039
statics) 0,08
6,842E01 6,843E01
0,021
0,10
1,659E+00
1,659E+00
0,026
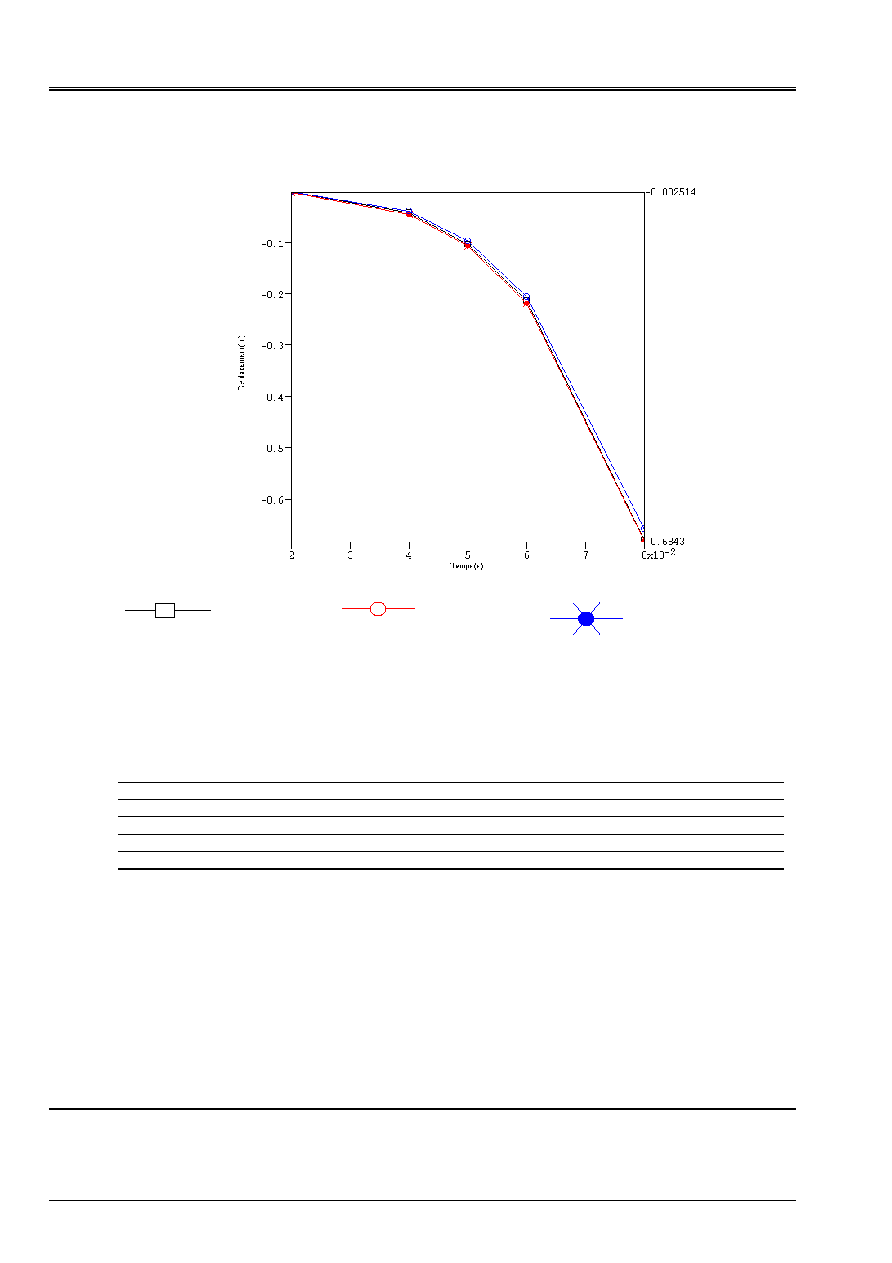
The results with incomplete modal base without static correction are not tested. One illustrates
below interest of the static correction:
Code_Aster
®
Version
5.0
Titrate:
Transitory SDLD04 Response of a system mass-springs
Date:
30/08/01
Author (S):
Fe WAECKEL, L. VIVAN
Key
:
V2.01.004-C
Page:
8/8
Manual of Validation
V2.01 booklet: Linear dynamics of the discrete systems
HT-62/01/012/A
Displacement of node NO4 (in meters) according to time
Complete base
Incomplete base
without correction
statics
Incomplete base with
static correction
Direct transitory calculation
One compares displacements calculated with the N04 node according to various diagrams
of integration:
Time (S)
Reference
Code_Aster
Diagram of
Newmark
Error
relative %
Code_Aster
Diagram of
centered differences
Error
relative %
0,02 2,700E03 2,680E03 0,741 2,660E03 1,482
0,04 4,260E02 4,272E02
0,279 4,264E02 0,091
0,05 1,041E01 1,042E01
0,134 1,041E01 0,015
0,06 2,158E01 2,161E01
0,121 2,159E01 0,038
0,08 6,813E01 6,819E01
0,094 6,745E01
1,004
0,10 1,658E+00 1,659E+00 0,082 1,645E+00 0,803
Taking into account of an initial state:
As waited, the relative displacements calculated in once are strictly identical to those
obtained by regarding as initial state the result of the last pitch of calculated time.
4.2 Parameters
of execution
Version: STA 5.02
Machine: SGI Origin 2000
Time CPU to use: 5,9 seconds
5
Summary of the results
The reference solution is an analytical calculation. The errors on the results obtained are normal
taking into account the pitch of time chosen for numerical integration.